Informations Techniques
Angle de vue
L’angle de vue est la zone indiquée à l’écran. L’angle est déterminé par la longueur focale de l’optique et le format du capteur correspondant.
Voir le tableau d’inversion
Bague d’inversion (pour microscopie)
Une bague d’inversion vissée sur l’avant du filtre de l’objectif correspondant permet d’être fixé sur la caméra dans le sens inverse. Ce qui permet d’avoir une MOD très courte et permet à l’objectif de faire la mise au point seulement en millimètres à partir de l’objet. Une bague d’extension supplémentaire permet un rapprochement encore plus près de l’objet. Les grossissements réalisables sont de grande qualité et d’une grande luminosité.
Balayage partiel (Partial Scan)
Lors d’un scannage partiel seulement une partie du capteur de l’image est lue. Cela peut être au choix une partie librement choisit ou une bande de l’image ainsi que la moitié, un quart ou un huitième de l’image.
Etant donné que la taille d‘une image partielle est plus petite, la caméra peut capturer plus d‘images par seconde, sans que le taux de données maximum de l‘appareil ne soit dépassé.
Le balayage partiel est plus difficile pour les capteurs CCD car chacune des lignes sont lues entièrement d’où une omission des pixels à droite et à gauche et aucun avantage au niveau de la vitesse.
Les caméras CMOS ne sont pas touchées par ces restrictions puisque chaque pixel à son propre convertisseur de signal et donc une lecture rapide est possible.
Binning
En mode binning les pixels sont adjacents horizontalement, verticalement ou dans les deux directions en tant que signal combiné. Bien que le binning réduise la résolution efficace de la caméra, on atteint en combinant les infor- mations du pixel, une sensibilité améliorée et un signal de bruit élevé. Le mode binning est souvent utilisé pour des applications faciles.
Camera Link™
Camera Link™ est une interface haut de gamme avec des débits de données très élevés. Elle est normalisée Automated Imaging Association (AIA), et sont réunis dans la caméra, le Frame-Grabber et le logiciel du fabricant de traitement d’images.
Avantage :
- Taux d’image élevé
Inconvénient :
- Composants supplémentaires requis (y compris Frame-Grabber) Système n’est pas interchangeable
Capteur CCD et CMOS
L’objet de base des capteurs CCD et CMOS de la caméra est la transformation de lumière (photonique) en signal électrique (électrons).
Capteur CCD
Les capteurs CCD sont sensibles à la lumière des composants électroniques qui ont un effet interne sur l’effet photoélectrique. Tous les CCD d’un champ sont composés de photodiodes sensibles à la lumière. CCD signifie Charge-coupled-Device qui est utilisé dans le capteur CCD. Dans le capteur CCD les charges seront pro- gressivement déplacées dans les registres et ensuite lues.
Aujourd’hui les capteurs CMOS sont utilisés en plus des capteurs CCD, dans la mesure où les inconvénients technologiques (bruit, faible sensibilité) ont été minimisés.
Capteur CMOS
Les capteurs CMOS convertissent la lumière des électrons par les composants électroniques qui se trouvent directement sur les pixels. Ainsi ils peuvent être directement lus et non enregistrés comme les capteurs CCD.
Les caractéristiques des capteurs CMOS comme la sensibilité de la lumière, le nombre de pixels, la vitesse de lecture, la taille de la puce, le bruit ou le bruit associé à l’image, ont été significativement améliorés au fil du temps et sont comparables voir supérieures à celle des capteurs CCD.
Champ horizontal
Le champ horizontal indique la partie d’une scène. Le champ horizontal dépend de la distance focale et du format d’enregistrement.
Changement de la mise au point
La lumière avec des longueurs d’ondes courtes est généralement plus réfractée que la lumière avec des longueurs d’ondes longues. Ce qui signifie que la lumière visible (longueur d’onde d’environ 380 nm à 780 nm) est plus réfractée que la lumière IR (de 780 nm à 1 400 nm).
Corrections des couleurs
Des objectifs, pour lesquels les composants du spectre (rouge et bleu/vert) ont été corrigés, sont appelés objectifs achromatiques. Pour les corrections de ces trois composants chromatiques de la plage visible et de la plage proche des infrarouges, il existe des objectifs dits superachromatiques.
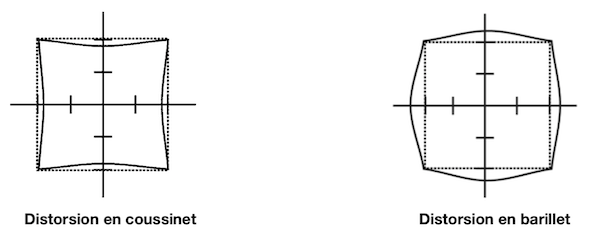
Distorsion
La distorsion est la particularité des objectifs à afficher des objets plus déformés au bord qu’au centre de l’image de ce fait les lignes droites à proximité du bord de l’image sont courbées vers l’intérieur ou l’extérieur. On nomme ce phénomène la distorsion en barillet si la courbe est vers l’extérieur et distorsion en coussinet si la courbe est dirigée vers l’intérieur (voir le schéma). En général, vous pouvez dire qu’un objectif présentant une faible distorsion est d’une qualité supérieure à celle d’un objectif présentant une distorsion plus importante.
Filtres
Filtre UV (UV = ultraviolet)
Les filtres UV bloquent la lumière ultraviolette, mais laissent passer la lumière visible. Souvent, les filtres UV s’utilisent pour protéger la lentille frontale de l’objectif.
Filtre polarisant
Un filtre polarisant permet d’éliminer les réflexions parasites sur des surfaces telles que les fenêtres ou l’eau.
Le filtre est monté sur un support rotatif dont il est possible d’intensifier ou de réduire l’effet en faisant tourner le filtre. En fonction des conditions d’éclairage, une intensification supplémentaire du contraste et de la saturation des couleurs peut se produire.
Filtres couleurs
Les filtres couleurs laissent passer seulement une certaine couleur (= rayonnement d’une longueur d’onde particulière) pour le capteur d’image. Ainsi un filtre rouge laisse passer seulement la lumière rouge. Les filtres couleurs sont utilisés pour accentuer certains détails de l’image ou pour cacher des perturbations.
Focale (f)
La distance focale d’une application optique est la distance entre un point focal et le point principal associé. Un système a deux points principaux et également deux focales. Les deux focales sont de taille égale quand une application sur les deux côtés se trouve au milieu avec le même indice. Avec une optique mince les deux points principaux coïncident au milieu de l’objectif. Dans ce cas la focale est égale à la
distance entre les points focaux du centre de la lentille.
Format 1/3", 1/2", 2/3", 1", 4/3"
Le terme «format» signifie que l’objectif sélectionné éclaire un cercle d’image qui correspond au diamètre du capteur de la caméra.
Les données des tailles sont mesurées en pouce parce que les capteurs d’image doivent remplacer l’ancien tube de l’image et les dimensions sont exprimées en pouces.
Des objectifs de plus grand format peuvent être utilisés sur des caméras dont les formats de capteur sont plus petits mais pas dans l’inverse car il y aurait des dégradés au bord.
Lors de l’utilisation, par exemple, d’un objectif 2/3" sur une caméra 1/3", l’angle de prise de vue sera toujours modifié. (Voir le tableau d’inversion)
Bien que les tailles des capteurs dans les caméras soient devenues plus petites, la tendance actuelle est de grande taille de 1" et 4/3" car les pixels sont plus grands.
Format de l’image
Les écrans et les caméras ont plusieurs formats d’image. Le format VGA a une taille de 640 x 480 points de l’image ou pixels. Il en résulte ainsi un rapport de 4 par 3 dans le plan horizontal sur l’axe vertical. D’autres formats 4:3 XGA (1024 x 768) et UXGA (1600 x 1200). Les formats les plus populaires sont les formats HD 720 (1280 x 720) et HD 1080 (1920 x 1080).
Fréquence d’image
La fréquence d’images ou framerate (fps = frame par seconde, image/seconde) indique le nombre d’images maximum que peut lire électroniquement une caméra. La fréquence d’image est en fonction de la durée d’exposition. Un nombre d’images élevé peut être obtenu avec des capteurs CMOS parce que les pixels contrairement aux capteurs CCD ne sont pas enregistrés comme lus mais avec l’aide de composants électroniques directement sur chaque pixel.
Gigabit Ethernet & GigE Vision™
Un nouveau développement dans le traitement d’image de la vision industrielle est le GigE Vision™ Standard. Ceci défini le Hardware standard sous forme d’une interface Gigabit-Ethernet répandue ainsi qu’un logiciel pour le protocole de communication standard. Ainsi appelé interface GenCam (interface de programmation générique pour toutes sortes de caméras), elle permet ainsi d’avoir une norme entre un fournisseur et un accès aux fonction- nalités des appareils et fait partie des GigE Vision™ Standard. Les solutions spéciales propriétaires sont évitées.
Avantage GigE Vision™:
- Hauts débits de 100MByte/s
- Ergonomie de l’infrastructure Ethernet existante
- Longueur du câble de 100m
- Haut degré de standardisation par le Gigabit Ethernet et la norme standard GigE Vision™
- Utilisation de technologies matériel du marché de masse (puces de contrôles, carte réseau, commutateurs, câbles, connecteurs ...)
Haute résolution
Les objectifs sont de haute résolution s’ils affichent un plus grand nombre de paires de lignes par millimètre à des contrastes plus élevés (mesurés selon la norme actuelle) que la moyenne générale de tous les objec- tifs (également désigné par la résolution MTF). Des objectifs haute-résolution reproduisent des images plus précises que les objectifs standards. En particulier, lorsque l’éclairage est faible, des images à contraste élevé peuvent être produites.
Interface caméra
Les caméras pour la vision industrielle transmettent des informations d’image en général à un PC. Les interfaces et protocoles nécessaires sont essentiellement analogiques, FireWire, Camera Link, Gigabit Ethernet, USB 2.0/3.0.
RICOH favorise par son programme caméra les interfaces Camera Link™ et GigE Vison™.
Voir aussi Camera Link™ et Gigabit Ethernet & GigE Vision™
Iris (F)
L’iris réduit la quantité de lumière incidente passant à travers l’objectif en coupant la trajectoire optique depuis le bord. La commande mécanique de l’exposition est composée d’une rangée circulaire de lamelles qui se chevauchent et qui modifie la taille de l’ouverture de l’iris.

En modifiant la vitesse d’obturation, vous contrôlez l’image de façon électronique (voir Shutter).
L’interaction de la luminosité, du réglage de la focale et la vitesse d’obturation pour la définition de l’éclairage permet de définir de manière ciblée l’effet des différentes ouvertures de l’iris. En diaphragmant, la limitation des rayons périphériques permet de réduire certaines aberrations optiques et augmentera la profondeur de champ.
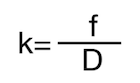 La taille de l’iris (k) est indiquée à l’aide du nombre d’ouverture de l’iris (f) qui peut être calculée comme étant le rapport de la focale (f) sur le diamètre effectif de la pupille d’entrée (D).
La taille de l’iris (k) est indiquée à l’aide du nombre d’ouverture de l’iris (f) qui peut être calculée comme étant le rapport de la focale (f) sur le diamètre effectif de la pupille d’entrée (D).
Les valeurs de l’iris sont normalisées au niveau international. Les nombres d’ouverture varient avec le facteur 2 . D’un nombre d’ouverture à l’autre plus élevé, la quantité de lumière F réduit de moitié.
La multiplication par deux du nombre de l’ouverture (par exemple de 8 à 16) s’accompagne d’une réduction d’un quart de la quantité de lumière car entre l’iris 8 et 16 il y a l’iris 11.

L’information F/1.4 – F/360 indique qu’une ouverture totale de F/1.4 est obtenue et qu’à la fermeture maximale de l’iris mécanique, par exemple F/22, un filtre spot à densité neutre (facteur 8) est intégré au centre de l’iris de l’objectif pour réduire davantage de lumière incidente et ce jusqu’à une valeur F/360.
Pour un zoom ou un objectif varifocale, l’indication F/1,4 désigne un nombre d’ouverture en position grand angle et parfois aussi pour la position téléobjectif. L’information F/1,6 à F/2,8 indique la luminosité en grand angle et la seconde valeur de l’iris représente l’ouverture maximale en position téléobjectif.
Une fermeture maximale de F/1000 est atteinte en utilisant un filtre spot. L’utilisateur d’un doubleur de focale impose la multiplication par deux de toutes les indications d’ouverture.
Mise au point
La mise au point d’une image doit être effectuée avec l’iris totalement ouvert afin d’obtenir la meilleure résolution d’image possible.
MOD (Distance Minimale par rapport à l’objet)
La distance minimale de la mise au point par rapport à l’objet est la distance la plus courte entre le capteur CCD et le sujet que vous pouvez filmer, qui peut être mis au point en utilisant la bague de mise au point (quand elle est définie sur «close-up»). Afin de réduire la MOD, vous pouvez augmenter la distance entre l’objectif et le capteur CCD à l’aide des bagues d’extension. La distance maximale autorisée par rapport à l’objet diminuera plus rapidement que la distance minimale par rapport à l’objet. Ainsi à partir d’une certaine valeur de bagues d’extension, il ne sera plus possible de procéder à la mise au point par le biais de la bague prévue à cet effet.
Modes caméra
voir balayage partiel et Binning
Monture C/CS
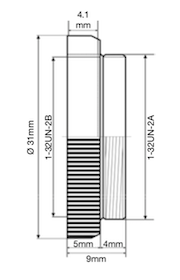 Le raccord de monture C ou CS est un filetage en pouces décrit par la spécification 1-32UN – 2A ou B ou un diamètre de 1 pouce x 32 TPI (TPI = pas par pouce) et correspond approxi- mativement ou filetage métrique de M25,5 x 0,75mm.
Le raccord de monture C ou CS est un filetage en pouces décrit par la spécification 1-32UN – 2A ou B ou un diamètre de 1 pouce x 32 TPI (TPI = pas par pouce) et correspond approxi- mativement ou filetage métrique de M25,5 x 0,75mm.
L’angle de la bague pour le filetage en pouces précédemment mentionné s’élève à 55°, toutefois, celui d’un filetage métrique s’élève à 60°. En utilisant l’adaptateur C-/CS (code produit FP-MA), une caméra en monture CS est adaptée pour utiliser nos objectifs en monture C. Il n’est pas possible d’utiliser des objectifs en monture CS sur une caméra en monture C.
Monture spéciale macro (FP-MUVG, FP-MU2M)
La monture spéciale macro est une monture spéciale intégrant une bague d’extension de 2 mm. De ce fait, le tirage mécanique de la monture C atteint alors 19,526 mm et la distance minimum par rapport à l’objet (MOD) est raccourcie. Ainsi des grands agrandissements sont possibles.
Afin d’utiliser notre monture spéciale macro, il est nécessaire de retirer la monture C de l’objectif (monture d’origine) et de la remplacer par une MUM-2 ou MUM-2M. Pour obtenir des agrandissements encore plus importants, vous pouvez utiliser des lentilles close-up et des bagues d’extension.
Objectifs entocentriques
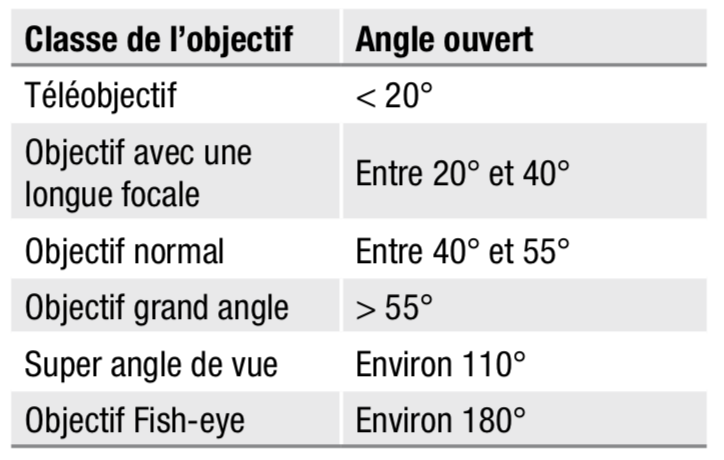 La plupart des objectifs pour la vision industrielle sont entocentriques. Objectifs avec focales fixes (angle ouvert fixe) et zooms (angle ouvert variable) sur le même principe optique et correspond à la perspective de l’œil humain.
La plupart des objectifs pour la vision industrielle sont entocentriques. Objectifs avec focales fixes (angle ouvert fixe) et zooms (angle ouvert variable) sur le même principe optique et correspond à la perspective de l’œil humain.
Un angle d’ouverture d’environ 50 degrés correspond à l’œil humain ainsi ces objectifs sont appelés objectifs normaux. Par l’intermédiaire de l’angle d’ouverture, les optiques sont divisées dans différentes classes.
Les objectifs entocentriques sont utilisés pour de nombreuses applications – y compris pour le contrôle de présence et d’équipement, application Pick-& Place, inspection d’impression d’image, applications de couleur et lecture de code barre.
Objectifs télécentriques
Les objectifs télécentriques sont généralement utilisés afin d’accomplir des tâches de mesure car même en changeant la position des objets, ils mesurent sans distorsion la perspective.
L’angle d‘ouverture de ces objectifs à l’intérieur d’une certaine zone fixe (zone télécentrique) est presque de zéro de- gré, de sorte que le faisceau soit presque parallèle et l’image n’a pas de perspective d’erreur. Chaque objet est affiché indépendamment de la distance avec la même taille et dans la structure de l’espace tels les trous et bords ne seront pas visualisés sur l’intérieur. Avec les objectifs télécentriques, le diamètre de la lentille frontale doit être au moins aussi grand que l’objet.
Protrusion
Certains objectifs C dépassent en profondeur le tirage mécanique de la caméra. Par conséquent, il est possible que l’objectif soit en contact avec la surface frontale du verre du filtre dans la caméra ou ne peut pas être vissé. Les caméras 3-CCD exigent souvent des objectifs avec un dépassement à l’arrière de 4,0 mm. Le bloc de prisme en face du CCD empêche d’utiliser des objectifs avec de larges dépassements.
Résolution (fonction de transfert de modulation)
Le terme de résolution se réfère à la différence des structures fines. A l’aide d’une charte de résolution présentant une structure de paires de lignes par millimètre progressivement plus fine, vous pouvez mesurer le contraste d’une optique. Dans la reproduction de motif de test, les structures sont généralement toujours plus «floues» vers les bords de la photo. La performance optique la plus importante d’un objectif repose généralement au centre de l’image. La structure la plus fine qui peut à peine être reconnue concerne la résolution au bord de l’image.
Si vous déterminez la luminosité du blanc à 100% et l’obscurité d’un noir profond dont la surface présente une luminosité de 0%, la différence de luminosité se réduit avec l’augmentation de la densité des paires de lignes, le contraste devient moindre. La performance du rendu d’une optique est indiquée dans un diagramme sur lequel la taille du grain de la structure (paire de ligne/mm) peut être lue en fonction du % de contraste reproduit réellement depuis le centre optique jusqu’aux bords de l’image.

Shutter
Le terme «Shutter» signifie «obturateur» dans le domaine de la photo. Un tel obturateur est une vanne qui régule le temps d’exposition d’un film.
Pour la caméra vidéo, un Shutter mécanique n’est pas approprié car il serait trop lent et d’un niveau trop élevé. Ainsi les caméras de surveillance ont un obturateur électronique.
Nous distinguons Global Shutter de Rolling Shutter :
Les capteurs CCD ont toujours un Global Shutter, dans lequel le capteur est exposé en une seule pièce. La plupart des capteurs CMOS ont un Rolling Shutter qui est exposé ligne par ligne. Plus récemment, il y a également des capteurs CMOS dotés d’un Global Shutter.
Global Shutter
Par le Global Shutter l’effacement et l’exposition correspondante de toutes les lignes du capteur sont effectués en même temps. A la fin de l’exposition toutes les lignes seront repoussées dans une zone sombre. La lecture de chaque ligne est effectuée séparément.
L‘exposition simultanée de toutes les lignes a l‘avantage que l‘image de l’objet en mouvement est reproduite sans distorsion. Les capteurs travaillant avec la méthode du Global Shutter sont cependant plus complexes que les capteurs avec un Rolling Shutter.
Rolling Shutter
Par le Rolling Shutter l’effacement et l’exposition du capteur est effectué par ligne légèrement décalée. A la fin de l’exposition les lignes sont lues successivement. Un décalage est créé entre le temps d’exposition de la première et de la dernière ligne, l’image d’un objet en mouvement sera déformée.
Taille et distance des pixels (taille des pixels / pixel pitch)
La distance du pixel sera la distance directe du pixel sur le capteur d’image ou indiqué sur l’écran, mesuré du milieu du pixel au centre du pixel.
La taille des pixels peut être différente pour la même taille des capteurs et identiques aux nombres de pixels car la taille des pixels varie.
Tirage mécanique (en anglais Backfocus)
Le tirage mécanique est la distance de la surface de l’objectif à la caméra jusqu’au capteur de l’image. En vidéo surveillance nous distinguons deux tirages mécaniques : Monture C avec 17,526 mm et monture CS avec 12,5 mm. (voir monture C/CS)
Traitement (traitement anti-reflet)
Un traitement de haute qualité limite les réflexions parasites de la lumière dans les optiques. Les réflexions à l’intérieur de l’objectif peuvent produire une série d’effets indésirables :
- Pour une image ayant une forte intensité lumineuse (par exemple, en raison de la source lumineuse elle-même ou des rayons du soleil), des reflets nébuleux, ponctuels ou encore des ombres sont générés. Dans le cas de reflets nébuleux, les éléments à faible contraste de l’image (par exemple des personnes dans l’ombre) peuvent ne plus apparaître (perte de contraste).
- Pour des capteurs CCD, les reflets clairs seuls créent des images fantôme qui peuvent passer sur toute l’image. La surcharge ponctuelle aboutira à l’effet «balayé» typique sur le capteur CCD.
La résistance à l’abrasion du traitement est également un élément important. Après chaque nettoyage de l’objectif, le traitement du verre ne doit pas être gommé, et son épaisseur ne doit pas changer. Seul un prétraitement extensif de la surface du verre garantit la longévité du traitement dont l’épaisseur est celle d’une lame de rasoir.
Transmission
La transmission indique le pourcentage de lumière transmise par l’objectif. En général, l’information de transmission couvre la plage spectrale de 300 nm à 1 200 nm (lumière visible pour un être humain entre 380 nm et 780 nm). La transmission varie selon la longueur d’onde de 0 % (aucune transmission) jusqu’à presque 100 % (la transmission la plus élevée).
Trigger (Modes trigger)
Les applications dans la vision industrielle ont habituellement un déclenchement de l’enregistrement de l’image. Comme les caméras n’ont pas d’obturateur mécanique, le capteur est exposé à la lumière en continu. Afin de limiter cette exposition permanente, le Trigger doit être installé (déclencheur).
- le Hardware du Trigger sera déclenché, le déclencheur est activé par une impulsion externe provenant d‘une cellule photo-électrique, par exemple
- le Software du Trigger, le déclencheur est activé par le logiciel de contrôle.
Le Trigger standard dans la technologie des caméras est le Pulse Width Trigger (contrôle de la largeur d’impulsion) et le Edge Preset Trigger (flancs par défaut). Par les deux modes de déclenchement, la caméra commence l’exposition par le flanc montant des signaux du Trigger et se finissent par la baisse. Le terme flanc définit le changement d’un signal numérique, à savoir la transition du bas vers le haut (flanc montant) ou haut vers bas (flanc descendant).
Le Trigger Edge-Width va modifier le temps d’exposition en plus d’une valeur modifiée dans la caméra.
Vignettage (diminution de la lumière ambiante)
Le vignettage est une diminution de la lumière dans les angles de l’image. Vous pouvez limiter le vignettage en réduisant l’ouverture de l’iris.
Tableau de Correspondance – Champ Horizontal
Les objectifs adaptent parfaitement aux caméras dont les capteurs ont un format inférieur ou égal à celui de l’objectif choisi. Voici la table de correspondance des champs horizontaux.

| Format | 1/3 | 1/2 | 1/1.8 | 1/1.7 | 2/3 | 1/1.2 | 1/1 | 1.1 | 35mm 24x36 1) |
|---|---|---|---|---|---|---|---|---|---|
| Capteur (mm) | |||||||||
| Horizontal | 4.8 | 6.4 | 7.2 | 7.5 | 8.8 | 11.3 | 12.8 | 14.2 | 36.0 |
| Vertical | 3.6 | 4.8 | 5.4 | 5.6 | 6.6 | 7.1 | 9.6 | 10.4 | 24.0 |
| Diagonal | 6.0 | 8.0 | 9.0 | 9.3 | 11.0 | 13.4 | 16.0 | 17.6 | 43.3 |
| Focale (mm) | |||||||||
| 4.2 | 56.4 ° | 74.6 ° | |||||||
| 4.8 | 50.2 ° | 67.4 ° | 73.7 ° | 76.7 ° | 85.0 ° | 150.0 ° | |||
| 6.0 | 41.1 ° | 56.1 ° | 61.9 ° | 64.7 ° | 72.5 ° | 143.0 ° | |||
| 8.0 | 31.4 ° | 43.6 ° | 48.5 ° | 50.8 ° | 57.6 ° | 132.1 ° | |||
| 8.5 | 29.7 ° | 41.3 ° | 45.9 ° | 48.2 ° | 54.7 ° | 129.4 ° | |||
| 12.0 | 21.2 ° | 29.9 ° | 33.4 ° | 35.1 ° | 40.3 ° | 50.4 ° | 56.1 ° | 61.2 ° | 112.6 ° |
| 12.5 | 20.4 ° | 28.7 ° | 32.1 ° | 33.8 ° | 38.8 ° | 48.6 ° | 54.2 ° | 110.4 ° | |
| 16.0 | 16.0 ° | 22.6 ° | 25.4 ° | 26.7 ° | 30.8 ° | 38.9 ° | 43.6 ° | 47.9 ° | 96.7 ° |
| 25.0 | 10.3 ° | 14.6 ° | 16.4 ° | 17.3 ° | 20.0 ° | 25.5 ° | 28.7 ° | 31.7 ° | 71.5 ° |
| 35.0 | 7.4 ° | 10.4 ° | 11.7 ° | 12.4 ° | 14.3 ° | 18.3 ° | 20.7 ° | 22.9 ° | 54.4 ° |
| 48.0 | 5.4 ° | 7.6 ° | 41.1 ° | ||||||
| 50.0 | 5.2 ° | 7.3 ° | 8.2 ° | 8.7 ° | 10.1 ° | 12.9 ° | 14.6 ° | 16.2 ° | 39.6 |
| 75.0 | 3.5 ° | 4.9 ° | 5.5 ° | 5.8 ° | 6.7 ° | 8.6 ° | 9.8 ° | 10.8 ° | 27.0 ° |
| 78.0 | 3.4 ° | 4.7 ° | 5.3 ° | 5.6 ° | 6.5 ° | 8.3 ° | 9.4 ° | 26.0 ° | |
Les angles de vue de cette table de correspondance sont des valeurs calculées. L’angle de vue respectif de chaque objectif peut varier en fonction de la conception de l’objectif.
1) Indication seulement