Technischer Leitfaden
Auflagemaß (engl. Backfocus)
Das Auflagemaß bezeichnet den Abstand vom Anfang des Objektivflansches an der Kamera bis zum Bild-Sensor. In der Videotechnik unterscheidet man zwei verschiedene, genormte Auflagemaße: C-Mount mit 17,526 mm und CS-Mount mit 12,5 mm.
siehe C-/CS-Mount
Auflösungsvermögen (Kontrastübertragungsfunktion)
Der Begriff Auflösungsvermögen bezeichnet die Unterscheidbarkeit feiner Strukturen. Mit Hilfe eines Testcharts mit zunehmend enger werdenden Linienpaaren pro Millimeter kann der Kontrast einer Optik gemessen werden. Bei der Abbildung dieser Testvorlage werden die Strukturen mit zunehmender Feinheit und gewöhnlich auch zum Bildrand hin „flauer“. Die höchste optische Leistung eines Objektivs liegt üblicherweise in der Bildmitte. Die feinsten Strukturen, die gerade noch zu erkennen sind, stellen die Auflösungsgrenze des jeweiligen Objektivs dar.
Bezeichnet man die Helligkeit von weiß mit 100% und die Helligkeit der tiefschwarzen Fläche mit 0%, wird der Helligkeitsunterschied mit zunehmender Linienpaardichte immer kleiner und der Kontrast wird geringer.
Die Abbildungsleistung einer Optik wird in einem Diagramm, der sogenannten MTF-Kurve (Modulations-Transfer-Kurve), angegeben wobei die Strukturfeinheit (Lp/mm = Linienpaare pro mm) in Abhängigkeit zum wiedergegebenen Kontrast abgelesen werden kann und zwar vom optischen Zentrum bis zum Bildrand.
Bildformate
Bei Bildschirmen und Kameras unterscheidet man verschiedene Bildformate. Das bekannte VGA-Format hat eine Größe von 640 x 480 Bildpunkten oder Pixeln. Damit ergibt sich ein Verhältnis von 4 zu 3 bei der horizontalen zur vertikalen Achse. Weitere 4:3-Formate sind XGA (1024 x 768) und UXGA (1600 x 1200). Die bekanntesten 16:9 Formate sind HD 720 (1280 x 720) und HD 1080 (1920 x 1080).
Bildfrequenz
siehe Framerate
Bildwinkel
Der Bildwinkel gibt den Ausschnitt einer Szene an. Der Bildwinkel ist von der Brennweite und dem Aufnahmeformat abhängig.
siehe Umrechnungstabelle
Binning
Beim Binning-Mode der Kamera werden benachbarte Pixel horizontal, vertikal oder in beide Richtungen als ein Signal zusammengefasst. Durch Binning reduziert sich zwar die effektive Auflösung der Kamera, erzielt aber durch das Zusammenfassen der Pixelinformationen eine erhöhte Empfindlichkeit und einen erhöhten Signal-Rausch-Abstand. Binning wird häufig bei sehr lichtschwachen Anwendungen eingesetzt.
Blende (F)
Die Blende (F) reduziert die durch das Objektiv fallende Lichtmenge indem der Strahlengang vom Rand her beschnitten wird. Die mechanische Regelung der Belichtung wird durch eine kreisförmige Anordnung mehrerer überlappender Lamellen erreicht, die die Größe der Blendenöffnung verändern.

Im Gegensatz dazu verändert der Shutter in MV Kameras die Sensor-Auslesezeit auf elektronischem Wege und regeltdamit die Belichtung (siehe Shutter).
Durch das Zusammenspiel von Beleuchtungsstärke, Blendeneinstellung und Sensor-Auslesezeit für die Einstellung der Belichtung bietet sich die Möglichkeit die Wirkungen verschiedener Blendenöffnungen gezielt einzusetzen.
Durch das Abschneiden der Randstrahlen werden beim Abblenden (= größere Blende) bestimmte Linsenfehler verringert und die Schärfentiefe erhöht sich.
 Die Größe der Blende gibt man in Blendenwerten (k) an, die sich aus dem Verhältnis Brennweite (f) durch effektive Eintrittspupille des Objektivs (D) berechnen läßt.
Die Größe der Blende gibt man in Blendenwerten (k) an, die sich aus dem Verhältnis Brennweite (f) durch effektive Eintrittspupille des Objektivs (D) berechnen läßt.
Blendenwerte sind international genormt. Die Blendenstufen verändern sich mit Faktor √2.
Bei Verdoppelung der Blendenzahl (z. B. von 8 auf 16) reduziert sich die Lichtmenge also auf ein Viertel, da zwischen Blende 8 und 16 noch die Blende 11 liegt.

Eine gebräuchliche Angabe F1,4 - F360 sagt aus, dass bei voll geöffneter Blende F1,4 erreicht wird und ab einem maximalen mechanischen Blendenschluss von z.B. F22 ein Spotfilter (Graufilter in der Linsenmitte mit Faktor 8) für eine weitere Verminderung des einfallenden Lichts bis zu einem Blendenwert von F360 sorgt.
Brennweite (f)
Die Brennweite eines optischen Abbildungssystems ist der Abstand zwischen einem Brennpunkt und der ihm zugeordneten Hauptebene. Ein Abbildungssystem hat zwei Hauptebenen und damit auch zwei Brennweiten. Beide Brennweiten sind gleich groß, wenn sich auf beiden Seiten des Abbildungssystems ein Medium mit dem gleichen Brechungsindex befindet. Bei einer dünnen Linse fallen beide Hauptebenen in der Mitte der Linse zusammen. In diesem Fall ist die Brennweite gleich dem Abstand der Brennpunkte von der Linsenmitte.
C-/CS-Mount
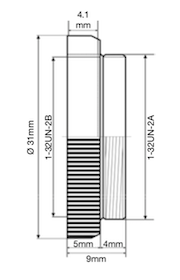 Der C- bzw. CS-Mount-Anschluß ist ein Zollgewinde mit der Spezifikation 1-32UN-2A oder B oder W 1 Zoll x 32GpZ (GpZ = Gänge pro Zoll) und entspricht nahezu dem metrischen Gewinde von M 25,5 x 0,75 mm. Der Flankenwinkel bei o. g. Zollgewinde beträgt 55°, der eines metrischen Gewindes jedoch 60°.
Der C- bzw. CS-Mount-Anschluß ist ein Zollgewinde mit der Spezifikation 1-32UN-2A oder B oder W 1 Zoll x 32GpZ (GpZ = Gänge pro Zoll) und entspricht nahezu dem metrischen Gewinde von M 25,5 x 0,75 mm. Der Flankenwinkel bei o. g. Zollgewinde beträgt 55°, der eines metrischen Gewindes jedoch 60°.
Durch Verwendung unseres C-/CS-Mount-Adapters FP-MA kann jede CS-Mount-Kamera an unsere C-Mount-Objektive adaptiert werden. Die Verwendung von CS-Mount-Objektiven an C-Mount-Kameras ist nicht möglich.
Camera Link™
Camera Link™ ist eine High-End-Schnittstelle mit sehr hohen Datenraten. Sie ist standardisiert von der Automated Imaging Assosiation (AIA), in der renommierte Kamera, Frame-Grabber und Software-Hersteller der industriellen Bildverarbeitung vereinigt sind.
Vorteile:
- Sehr hohe Bildraten
Nachteile:
- Zusätzliche Komponenten notwendig (u.a. Frame-Grabber)
- System nicht beliebig austauschbar
CCD- und CMOS-Sensor
Die grundlegende Aufgabe der CCD- und CMOS-Sensoren in der Kamera besteht in der Umwandlung von Licht (Photonen) in elektrische Signale (Elektronen).
CCD-Sensor
CCD-Sensoren sind lichtempfindliche elektronische Bauelemente, die auf dem inneren Photoeffekt beruhen. Alle CCD bestehen aus einem Array (Feld) lichtempfindlicher Fotodioden. CCD ist hierbei die Abkürzung von Charge-coupled Device, welches im CCD-Sensor verwendet wird. Beim CCD-Sensor werden die Ladungen schrittweise in Registern verschoben und erst dann ausgelesen.
Heutzutage werden neben CCDs zunehmend auch CMOS-Sensoren eingesetzt, da deren Nachteile (Rauschen, geringere Empfindlichkeit) minimiert wurden.
CMOS-Sensor
Beim CMOS-Sensor erfolgt die Umwandlung von Licht in Elektronen durch elektronische Bauteile, die sich unmittelbar am Pixel befinden. Somit werden sie direkt ausgelesen und nicht registerweise wie beim CCD-Sensor.
Kennwerte von CMOS-Sensoren wie die Lichtempfindlichkeit, Pixelzahl, Auslesegeschwindigkeit, Chipgröße, das Bildrauschen oder den mit dem Bildrauschen in Zusammenhang stehenden Dynamikbereich wurdenim Laufe der Zeit wesentlich verbessert und sind qualitativ durchaus vergleichbar oder besser als die von CCD-Sensoren. CMOS-Sensoren können kompakter und preiswerter produziert werden. Außerdem ist die Leistungsaufnahme wesentlich geringer.
Distorsion
siehe Verzeichnung
Eintauchtiefe (Protrusion)
Einzelne C-Mount-Objektive ragen sehr weit in den Kameraflansch hinein. Dadurch kann es vorkommen, dass ein Objektiv mit der Rückseite an das Filterglas in der Kamera stößt oder sogar überhaupt nicht eingeschraubt werden kann. Besonders 3-CCD-Kameras benötigen häufig Objektive mit einer maximalen Eintauchtiefe von 4,0 mm in das Kameragehäuse. Der Prismenblock über dem CCD verhindert, dass Objektive eingesetzt werden können die weiter in den Kamerakörper hineinreichen.
Entozentrische Objektive
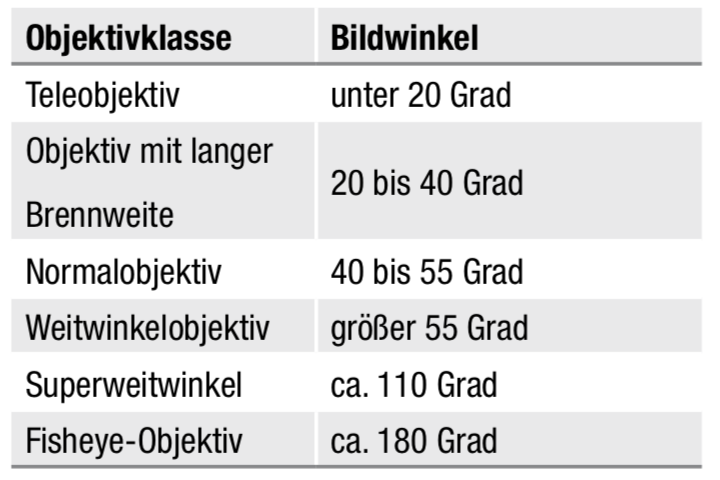 Die meisten Objektive in der MV sind entozentrische Objektive. Dabei beruhen Objektive mit Festbrennweiten (fester Bildwinkel) und Zoomobjektive (variabler Bildwinkel) auf dem gleichen optischen Prinzip und entsprechen der Perspektive des menschlichen Auges.
Die meisten Objektive in der MV sind entozentrische Objektive. Dabei beruhen Objektive mit Festbrennweiten (fester Bildwinkel) und Zoomobjektive (variabler Bildwinkel) auf dem gleichen optischen Prinzip und entsprechen der Perspektive des menschlichen Auges.
Ein Bildwinkel von ca. 50 Grad entspricht dem des menschlichen Auges, deshalb werden diese Objektive Normalobjektive genannt. Anhand des Bildwinkels können die Objektive in verschiedene Klassen eingeteilt werden.
Entozentrische Objektive werden für viele Anwendungsgebiete eingesetzt – unter anderem für Anwesenheits- und Bestückungskontrollen, Pick-& Place-Applikationen, Druckbildinspektionen, Farbapplikationen und Barcode lesen.
Farbkorrektur
Objektive, bei denen der rote und blaugrüne Spektralanteil korrigiert wurde, nennen sich Achromaten. Bei Korrektur von drei Farbanteilen aus dem sichtbaren Bereich des Lichts heißen sie Apochromaten und bei der Korrektur von Farbanteilen aus dem sichtbaren Bereich und dem nicht sichtbaren nahen Infrarot-Bereich nennen sie sich Super-achromaten.
Filter
UV-Filter (UV = Ultraviolett)
UV-Filter sperren UV-Licht, lassen jedoch sichtbares Licht passieren. Häufig werden UV-Filter als mechanischer Schutz für die wertvollen Frontlinsen der Objektive eingesetzt.
Pol-Filter (Polarisations-Filter)
Mit einem Pol-Filter können unerwünschte Reflektionen auf spiegelnden, nicht-metallischen, Oberflächen eliminiert werden. Der Filter ist in der Regel in eine drehbare Fassung eingesetzt. Durch drehen des Filters kann die Wirkung verstärkt oder vermindert werden kann. Je nach Lichtverhältnissen kann zusätzlich eine Verstärkung des Kontrastes und der Färbsättigung eintreten.
Farb-Filter
Farb-Filter lassen nur eine bestimmte Farbe (= Strahlung einer bestimmten Wellenläge) zum Bildsensor passieren. So läßt z.B. ein Rotfilter nur rotes Licht passieren. Farb-Filter werden genutzt, um bestimmte Details des Bildes zu betonen oder Störeinflüsse auszublenden.
Fokus
Die Scharfeinstellung von Abbildungen sollte immer bei offener Blende vorgenommen werden um die größtmögliche Abbildungsschärfe zu erhalten.
Fokusverschiebung (engl. Focusshift)
Licht mit kürzeren Wellenlängen wird i. d. R. von Glas stärker gebrochen als Licht mit längeren Wellenlängen, d. h. sichtbares Licht (etwa 380 nm bis 780 nm Wellenlänge) wird stärker gebrochen als IR-Licht (780 nm bis 1400 nm).
Format 1/3", 1/2", 2/3", 1", 4/3"
Die Bezeichnung „Format“ besagt, dass das ausgewählte Objektiv einen Bildkreis ausleuchtet, dessen Größe dem Bildsensor in der Kamera entspricht.
Die Größenangaben erfolgen in Zoll, da Bildsensoren die Bildröhren aus früheren Zeiten ersetzen sollten und deren Maße wurden in Zoll angegeben.
Objektive mit großem Format sind ohne Einschränkung an Kameras mit kleinerem Bildsensor zu verwenden, jedoch nicht umgekehrt, da sonst Abschattierungen am Rand auftreten.
Beim Einsatz von z. B. einem 2/3" Objektiv an einer 1/3" Kamera verändert sich jedoch der für dieses Objektiv angegebene Bildwinkel. (siehe Umrechnungstabelle)
Während in der Vergangenheit die Sensoren in den Kameras immer kleiner wurden, geht der derzeitige Trend hin zu großen Formaten von 1" und 4/3", da hier die Pixel größer sind.
Framerate
Die Bildfrequenz oder Framerate (fps = frames per second; Bilder/sek.) gibt an, wie viele Bilder eine Kamera maximal elektronisch auslesen kann. Die Bildfrequenz ist u.a. abhängig von der Belichtungszeit.
Sehr hohe Frameraten werden mit CMOS-Sensoren erreicht, da dort die Pixel im Gegensatz zum CCD-Sensor nicht registerweise ausgelesen werden, sondern mit Hilfe von elektronischen Bauteilen direkt an jedem Pixel.
Geringe Verzerrung
Diese Objektive wurden optisch dahingehend entwickelt, Verzeichnungen zu reduzieren, die ein Problem bei Messaufgaben und in der Bilderkennung darstellen. Ihre TV-Verzeichnung ist dabei geringer als 0,1%1 (Abbildung 1). Daher eignen sie sich ideal für die Aufnahme von Bildern mit geringer Verzeichnung über das gesamte Bildmessfeld.
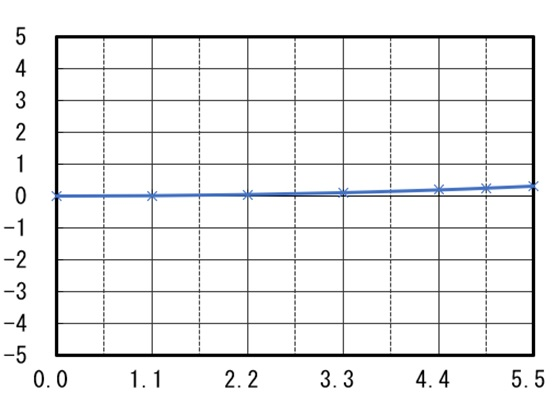
Abbildung 1. Verzerrung
Durch das Erreichen einer geringen Verzeichnung wird eine Verschlechterung der Abbildung an den Bildrändern unterdrückt. Umgekehrt können Sie bei einem Standardobjektiv mit 5 Megapixeln bei einem Arbeitsabstand von 100 mm und einer Einstellung von F: 1,8 wie im folgenden Beispiel feststellen, dass periphere Verzeichnungen erkennbar werden.
Neue Ricoh 5MX Baureihe Standard 5MP FA Objektiv
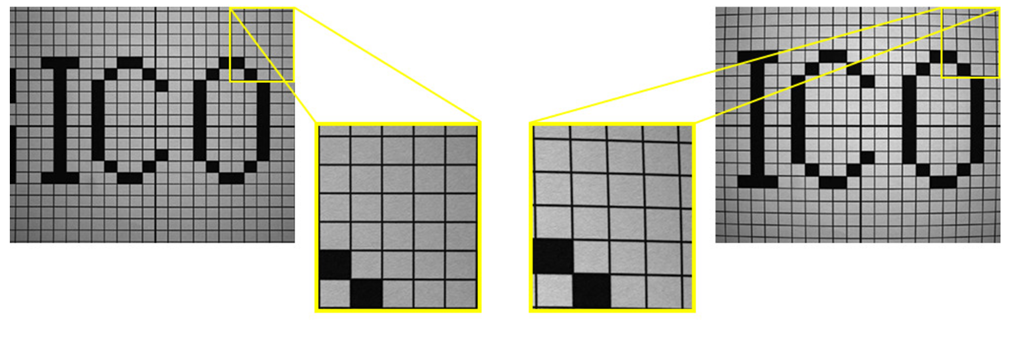
Objektiv: 16mm F1.8
Kamera: 2/3"
Objekt: Mathematisches Papier
Arbaitsabstand: 100mm
Abbildung 2.
1 Ausnahme 8 mm
Gigabit Ethernet & GigE Vision™
Eine neue Entwicklung im industriellen Bildverarbeitungsmarkt ist der GigE Vision™-Standard. Dieser definiert den Hardware-Standard in Form der weit verbreiteten Gigabit-Ethernetschnittstelle, sowie den Software-Standard für das Kommunikationsprotokoll. Das so genannte GenICam-Interface (generic programming interface for all kinds of cameras) ermöglicht einen Hersteller übergreifenden Standard und Zugriff auf die Funktionalitäten der Geräte und ist Teil des GigE Vision™ Standards. Proprietäre Sonderlösungen werden vermieden.
Vorteile von GigE Vision™:
- Hohe Datenraten von 100 MByte/s
- Verwendbarkeit bestehender Ethernet-Infrastruktur
- Kabellänge bis zu 100 m
- Hoher Standardisierungsgrad durch Gigabit Ethernet und GigE Vision™ Standards
- Einsatz von Hardware-Technologien aus dem Massenmarkt (Controllerchips, Netzwerkkarten, Switche, Kabel, Stecker, ...)
Hochauflösend
Als hochauflösend bezeichnet man Objektive, die bei höherem Kontrast (gemessen am augenblicklichen Standard) eine größere Anzahl von Linienpaaren pro Millimeter darstellen, als der allgemeine Durchschnitt aller Objektive
(siehe auch: Auflösungsvermögen MTF). Hochauflösende Objektive bilden daher schärfer ab als Standard-Objektive. Besonders bei geringer Beleuchtung lassen sich kontrastreichere Bilder erzeugen.
JIIA S-Rank Performance
JIIA (Japan Industrial Imaging Association) gibt in ihrem technischen Bericht JIIA LER-007-2012Rev2 Empfehlungen für die optischen Spezifikationen von Objektiven für hochauflösende Kameras (für Sensoren mit einer Pixelgröße von unter 7,6 µm).
Diese hochauflösenden Objektive werden nach ihrer optischen Leistung, hauptsächlich nach ihrer Auflösung, in S-Rank und A-Rank unterteilt:
(1) S-Rank:
Hochleistungsobjektive, bei denen die Spezifikationen über den gesamten Bildbereich gegeben sind. Das Objektiv sollte über den gesamten Bildbereich vollständig in der Nyquist-Frequenz auflösen*.
(2) A-Rank:
Standard Performance Objektive, bei denen die Spezifikationen über einen großen Teil des Bildbereichs gegeben sind. Das Objektiv sollte in der Mitte des Bildbereichs in der Nyquist-Frequenz auflösen und in der äußersten Peripherie des Bildbereichs in 70% der Nyquist-Frequenz auflösen.
* Die Auflösung sollte höher als 20% des Kontrastverhältnisses im MTF sein.
Die Nyquist-Frequenz als ausgewertete Ortsfrequenz sollte folgendermaßen berechnet werden:
fNq = 1/(2 x p )
fNq : Nyquist-Frequenz (lp/mm)
p : Pixelgröße (mm)
Frequenz nach Anzahl der Pixel (typisch)
|
Sensorgröße- diagonale |
Bildhöhe |
1 Megapixel |
2 Megapixels |
5 Megapixels |
10 Megapixels |
||||
|
S-Rank |
A-Rank |
S-Rank |
A-Rank |
S-Rank |
A-Rank |
S-Rank |
A-Rank |
||
|
2/3” 11mm |
Center |
66 |
66 |
93 |
93 |
147 |
147 |
207 |
207 |
|
Peripherie |
46 |
65 |
103 |
145 |
|||||
|
1/2” 8mm |
Center |
90 |
90 |
128 |
128 |
202 |
202 |
285 |
285 |
|
Peripherie |
63 |
90 |
141 |
200 |
|||||
2 Megapixel S-Rank Performance
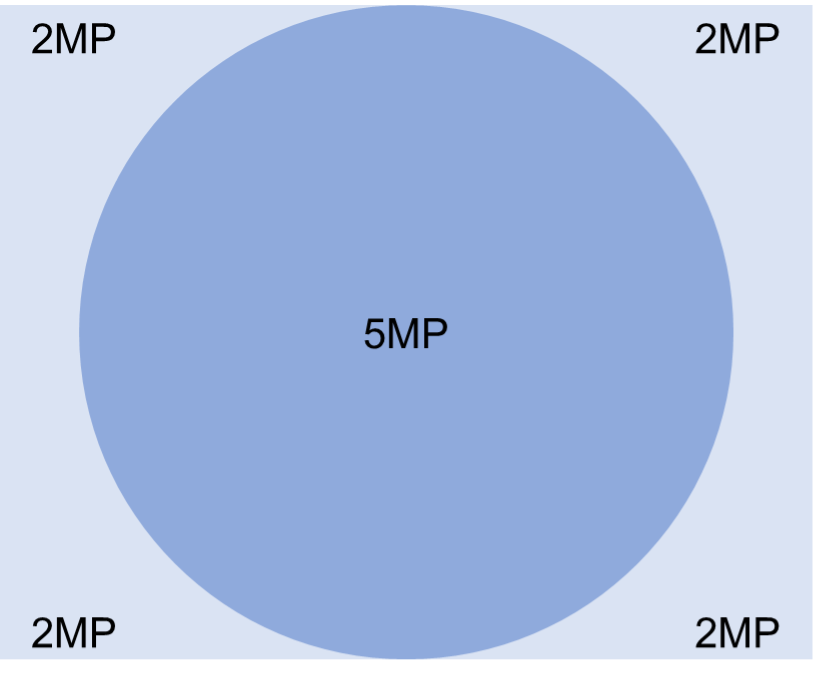
Unsere 2/3" 2 Megapixel Objektive können mit dem 2/3“ 5 Megapixel Sensor (Sony IMX250) in A-Rank Performance eingesetzt werden.
5MP überschreitende Objektive (5MX) S-Rank Performance
Diese 5 Megapixel Objektive bieten eine gleichbleibende Leistung über den gesamten Sensorbereich und sind in den Brennweiten 8, 12, 16, 25 und 35 mm verfügbar. Sie weisen an den Bildrändern so gut wie keine Verschlechterung der Bildqualität auf, und selbst bei Arbeitsabständen außerhalb ihrer optimalen Designkriterien, erfüllen sie die strengen Standards von Ricoh, und gewährleisten somit beste optische Eigenschaften. Wir können diese Objektive mit Sicherheit als hochauflösende Bildverarbeitungsobjektive empfehlen, da sie Bilder mit 147 lp/mm Auflösung und geringer Verzerrung nicht nur von der Mitte bis zur Peripherie, sondern über den gesamten Sensor aufnehmen.
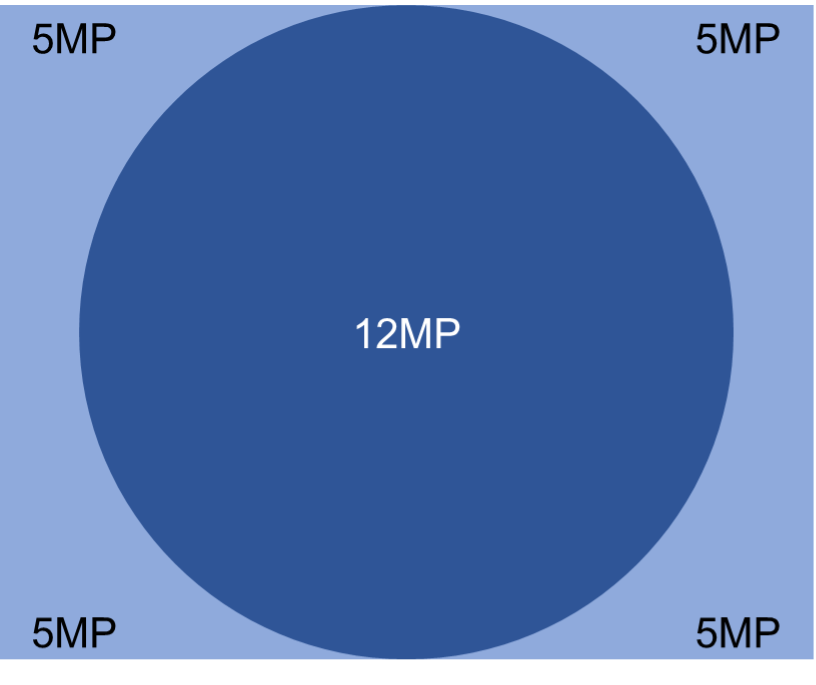
Unsere 5 Megapixel überschreitenden Objektive (5MX Baureihe) können mit dem 8,3 Megapixel Sensor (Sony IMX267) in A-Rank Performance eingesetzt werden.
9MP (1”) / 12MP (1,1”) S-Rank Performance
Die Ricoh 9 Megapixel (1“) / 12 Megapixel (1,1“) Objektive sind in den Brennweiten 12, 16, 25, 35, 50 und 75 mm erhältlich. Auch diese Objektivbaureihe hat nahezu keine Verschlechterung der Bildqualität an den Rändern und selbst bei Arbeitsabständen außerhalb ihrer optimalen Designkriterien, erfüllen sie die strengen Standards von Ricoh, und gewährleisten somit beste optische Eigenschaften. Wir können diese Objektive mit Sicherheit als hochauflösende Bildverarbeitungsobjektive empfehlen, da sie Bilder mit 147 lp/mm Auflösung und geringer Verzerrung nicht nur von der Mitte bis zur Peripherie, sondern über den gesamten Sensor aufnehmen.
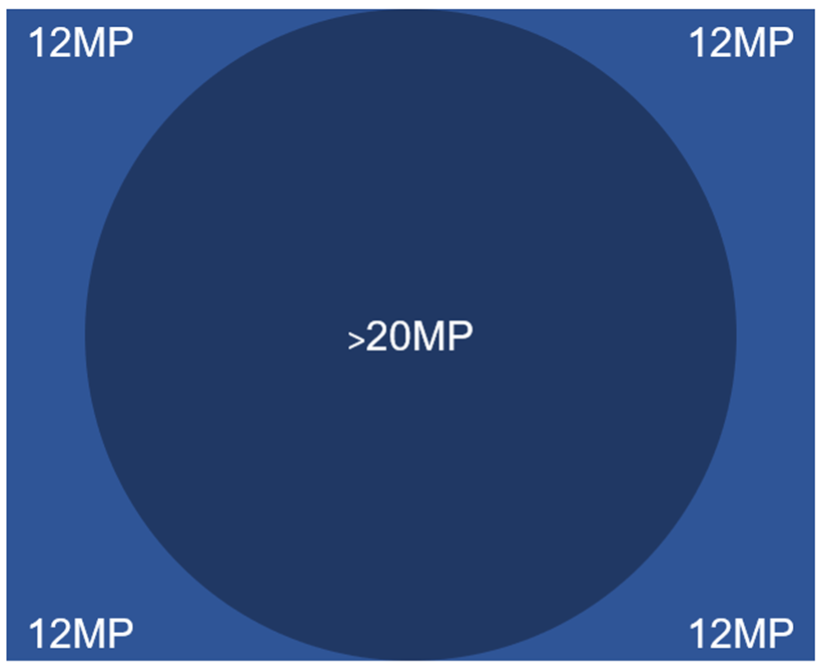
Unsere 9MP (1”) / 12MP (1,1”) Objektive können mit dem 1” 20MP (Sony IMX183) Sensor in A-Rank Performance eingesetzt werden.
Kamera Modi
siehe Partial-Scan und Binning
Kamera-Schnittstellen
Industrielle Kameras übertragen die Bildinformationen in der Regel an einen PC. Die dazu notwendigen Schnittstellen und Protokolle sind im wesentlichen Analog, FireWire, CameraLink, Gigabit Ethernet, USB 2.0/3.0
Ricoh unterstützt bei ihrem Kameraprogramm die Schnittstellen Camera Link™ und GigE Vison™.
siehe auch Camera Link™ und Gigabit Ethernet & GigE Vision™
Makro-Fokus-Mount (FP-MUVG, FP-MU2M)
Das Makro-Fokus-Mount ist ein spezieller Kameraanschluss (Mount) mit einem um 2 mm verlängerten Tubus. Das C-Mount-Auflagemaß wird dadurch um 2 mm auf 19,526 mm verlängert und die Minimale Objektdistanz (MOD) verkürzt. Dadurch werden größere Abbildungsmaßstäbe ermöglicht.
Um unseren Makro-Fokus-Mount zu verwenden, ist der standardmäßig angebrachte C-Mount-Anschluss am Objektiv zu entfernen und durch MUM-2 oder MUM-2M zu ersetzen. Um noch stärkere Vergrößerungen zu erreichen, können zusätzlich Nahlinsen und Zwischenringe eingesetzt werden.
MOD (Minimale Objektdistanz)
Die Minimale Objektdistanz ist der kürzeste Abstand zwischen der vordersten Linse des Objektivs und dem Motiv bei dem mit dem Fokusring (Einstellung auf „nah“) noch scharf gestellt werden kann. Um die MOD zu verkleinern kann mit Zwischenringen (oder Verlängerungstuben) die Distanz zwischen Objektiv und Bildsensor vergrößert werden. Die maximale Objektdistanz verkleinert sich dabei schneller als die minimale Objektdistanz, so dass ab einer bestimmten Verlängerung des Abstandes keine Fokussierung über den Fokusring mehr möglich ist.
Partial Scan
Beim Partial Scan wird nur ein Teilbild des Sensors ausgelesen. Dies kann ein frei gewählter Bildausschnitt sein oder ein Bildstreifen also ein halbes, viertel oder achtel Bild.
Da die Größe eines Teilbildes kleiner ist, kann die Kamera mehr Bilder pro Sekunde erfassen, ohne dass die maximale Datenrate des Geräts überschritten wird.
Partial Scan ist bei CCD-Sensoren schwieriger, da hier jeweils ganze Zeilen ausgelesen werden und somit ein Weglassen von Pixeln rechts und links in einer Zeile keinen Geschwindigkeitsvorteil bringt.
CMOS-Kameras sind von diesen Einschränkungen nicht betroffen, da jedes Pixel von seinen eigenen Signalwandler umgeben ist und damit ein schnelles Auslesen möglich ist.
Pixelgröße und Pixelabstand (Pixelsize und Pixelpitch)
Mit Pixelabstand wird der direkte Abstand der Pixel auf Bildsensoren oder Bildschirmen bezeichnet, gemessen von Pixelmitte zu Pixelmitte. Pixelabstand ist nicht identisch mit der Pixelgröße.
Die Pixelgröße kann bei gleichgroßen Sensoren und identischer Pixelanzahl unterschiedlich sein, da der Pixelabstand variiert.
Shutter
Der englische Begriff „Shutter“ bedeutet im Fotobereich „Verschluss“. Ein solcher Verschluss ist bildlich gesprochen eine Klappe, die die Belichtungszeit eines Films reguliert.
Für Videokameras ist ein mechanischer Shutter nicht geeignet, da er zu langsam wäre und einen hohen Verschleiss hätte. Aus diesem Grund haben Videokameras einen elektronischen Verschluss der Kamera.
Man unterscheidet Global Shutter und Rolling Shutter.
CCD-Sensoren haben stets einen Global Shutter, bei dem der Sensor in einem Stück belichtet wird. Die meisten CMOS-Sensoren haben einen Rolling Shutter, der zeilenweise belichtet wird. Neuerdings gibt es aber auch CMOS-Sensoren mit einen Global Shutter.
Global Shutter
Beim Global-Shutter-Verfahren erfolgt das Löschen und die daran anschließende Belichtung aller Sensorzeilen gleichzeitig. Zum Ende der Belichtung werden alle Zeilen gleichzeitig in einen abgedunkelten Sensorbereich verschoben. Das Auslesen der einzelnen Zeilen erfolgt dann separat.
Das simultane Belichten aller Zeilen hat den Vorteil, dass das Abbild eines bewegten Objektes verzerrungsfrei wiedergegeben wird. Sensoren die mit dem Global-Shutter-Verfahren arbeiten sind jedoch komplexer aufgebaut als Rolling-Shutter-Sensoren.
Rolling Shutter
Beim Rolling-Shutter-Verfahren erfolgt das Löschen und die Belichtung des Sensors zeilenweise leicht versetzt. Zum Ende der Belichtung werden die Zeilen nacheinander ausgelesen. Da hierdurch zwischen der Belichtung der ersten und der letzten Sensorzeile ein Zeitversatz entsteht, wird das Abbild eines bewegten Objektes verzerrt dargestellt.
Telezentrische Objektive
Bei Messaufgaben setzt man in der Regel Telezentrische Objektive ein, da sie bei wechselnden Objektpositionen ohne perspektivische Verzerrung messen.
Der Bildwinkel beträgt bei diesen Objektiven innerhalb einer bestimmten festen Zone (Telezentrie-Bereich) quasi null Grad, daher verläuft der Strahlengang nahezu parallel und das Bild weißt keinen perspektivischen Fehler auf. Jedes Objekt erscheint unabhängig von der Entfernung gleich groß und in räumliche Strukturen wie Bohrungen und Flanken wird nicht auf den Innenrand geblickt. Bei telezentrischen Objektiven muss der Durchmesser der Frontlinse mindestens so groß sein wie das aufzunehmende Objekt.
Transmission
Die Transmission gibt die Lichtdurchlässigkeit eines Objektivs an. Üblicherweise wird die Transmission für einen Wellenlängenbereich von ca. 300 nm bis 1200 nm angegeben (Licht ist für das menschliche Auge etwa zwischen 380 nm und 780 nm sichtbar). Die Transmission reicht von 0% (keine Lichtdurchlässigkeit) bis nahezu 100% (größtmögliche Lichtdurchlässigkeit).
Trigger-Funktionen (Triggermodi)
In der Bildverarbeitung arbeiten Applikationen meist mit einer getriggerten Bildaufnahme. Da die Kameras keinen mechanischer Verschluss zur Belichtungssteuerung besitzen, wird der Sensor fortlaufend belichtet. Um diese fortlaufende Belichtung zu beschränken, setzt man Trigger (Auslöser) ein.
- Beim Hardware-Trigger wird die Triggerung durch einen externen Impuls ausgelöst, der z. B. von einer Lichtschranke kommt.
- Beim Software-Trigger wird die Triggerung durch die Steuersoftware ausgelöst.
Standard-Trigger in der Kameratechnik sind der Pulse Width Trigger (Pulsweitenkontrolle) und der Edge Preset Trigger (Flanken-Voreinstellung) Bei beiden Triggermodi startet die Kamera die Belichtung bei der steigenden Flanke des Trigger-Signals und beendet sie bei der fallenden. Der Begriff Flanke bezeichnet dabei die Veränderung eines digitalen Signals, also den Übergang von Low zu High (steigende Flanke) oder High zu Low (fallende Flanke).
Beim Edge-Width Trigger wird die Belichtungszeit zusätzlich noch durch einen in der Kamera eingestellten Wert verändert.
Umkehrring
Ein auf dem Filtergewinde aufgeschraubter Adapter erlaubt es, das Objektiv verkehrt herum auf die Kamera zu montieren. So ist es möglich, sehr kurze Zielweiten einzustellen, ohne einen überlangen Tubus montieren zu müssen. Ein zusätzlicher Tubus erlaubt eine noch weitere Annäherung an das Objekt. Die so realisierbaren Vergrößerungen sind von hoher Qualität und Lichtstärke.
Vergütung (Entspiegelung)
Eine hohe Qualität der Vergütung vermindert Streulicht in der Optik. Reflexionen im Inneren der Optik verursachen eine Reihe von unerwünschten Effekten:
- Bei Aufnahmen mit hoher Beleuchtungsintensität (z. B. durch die Lichtquelle selbst oder durch Sonneneinstrahlung) entstehen nebelartige oder punktförmige Reflexionen oder auch sog. Geisterbilder. Bei nebelartigen Reflexionen sind kontrastarme Bildinhalte nicht mehr darstellbar (Kontrastverlust).
- Bei CCD-Sensoren führen einzelne helle Reflexe zu Bildstörungen, die über das komplette Bild hinweg verlaufen können. Diese punktuelle Überladung führt zu dem CCD-Sensor typischen „Smear“-Effekt.
Ein anderer sehr wichtiger Punkt ist die Abriebfestigkeit der Vergütung. Nach einer Wartung oder Reinigung des Objektives sollte die Glasoberflächenvergütung weder abgerieben, noch in ihrer Schichtdicke verändert sein. Aufwendige Vorbehandlungen der Glasoberflächen garantieren erst eine lange Lebensdauer der hauchdünnen Beschichtung.
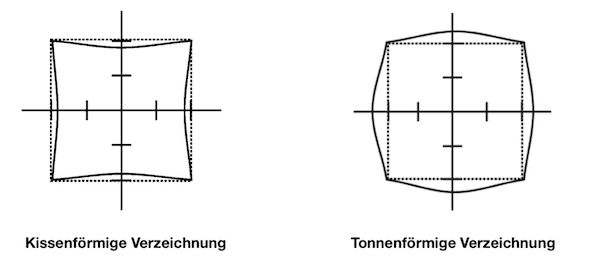
Verzeichnung
Als Verzeichnung (Distorsion) bezeichnet man die negative Eigenschaft von Objektiven, Gegenstände zum Bildrand hin immer stärker verzerrt darzustellen. Gerade Linien werden in der Nähe des Bildrandes nach außen oder innen gewölbt (verzerrt). Man spricht von tonnenförmiger Verzeichnung, wenn die Wölbung nach außen, und von kissenförmiger Verzeichnung, wenn die Wölbung nach innen gerichtet ist (siehe Abbildung). Generell kann gesagt werden, dass ein Objektiv mit geringerer Verzeichnung von höherer Qualität ist, als ein Objektiv mit höherer Verzeichnung.
Vignettierung (Randhelligkeitsabfall)
Mit Vignettierung bezeichnet man den Lichtabfall in den Bildecken, der durch mechanische (künstliche) Verengung oder durch physikalische (natürliche) Effekte entsteht. Durch Abblenden des Objektivs kann die Vignettierung verringert werden.
Umrechnungstabelle für Horizontale Bildwinkel
Objektive können an Kameras eingesetzt werden, die einen kleineren Sensor besitzen, jedoch nicht umgekehrt. Dabei ändert sich der Bildwinkel entsprechend der untenstehenden Tabelle.

| Format | 1/3 | 1/2 | 1/1.8 | 1/1.7 | 2/3 | 1/1.2 | 1/1 | 1.1 | 35mm 24x36 1) |
|---|---|---|---|---|---|---|---|---|---|
| Sensor (mm) | |||||||||
| Horizontal | 4.8 | 6.4 | 7.2 | 7.5 | 8.8 | 11.3 | 12.8 | 14.2 | 36.0 |
| Vertical | 3.6 | 4.8 | 5.4 | 5.6 | 6.6 | 7.1 | 9.6 | 10.4 | 24.0 |
| Diagonal | 6.0 | 8.0 | 9.0 | 9.3 | 11.0 | 13.4 | 16.0 | 17.6 | 43.3 |
| Brennweite (mm) | |||||||||
| 4.2 | 56.4 ° | 74.6 ° | |||||||
| 4.8 | 50.2 ° | 67.4 ° | 73.7 ° | 76.7 ° | 85.0 ° | 150.0 ° | |||
| 6.0 | 41.1 ° | 56.1 ° | 61.9 ° | 64.7 ° | 72.5 ° | 143.0 ° | |||
| 8.0 | 31.4 ° | 43.6 ° | 48.5 ° | 50.8 ° | 57.6 ° | 132.1 ° | |||
| 8.5 | 29.7 ° | 41.3 ° | 45.9 ° | 48.2 ° | 54.7 ° | 129.4 ° | |||
| 12.0 | 21.2 ° | 29.9 ° | 33.4 ° | 35.1 ° | 40.3 ° | 50.4 ° | 56.1 ° | 61.2 ° | 112.6 ° |
| 12.5 | 20.4 ° | 28.7 ° | 32.1 ° | 33.8 ° | 38.8 ° | 48.6 ° | 54.2 ° | 110.4 ° | |
| 16.0 | 16.0 ° | 22.6 ° | 25.4 ° | 26.7 ° | 30.8 ° | 38.9 ° | 43.6 ° | 47.9 ° | 96.7 ° |
| 25.0 | 10.3 ° | 14.6 ° | 16.4 ° | 17.3 ° | 20.0 ° | 25.5 ° | 28.7 ° | 31.7 ° | 71.5 ° |
| 35.0 | 7.4 ° | 10.4 ° | 11.7 ° | 12.4 ° | 14.3 ° | 18.3 ° | 20.7 ° | 22.9 ° | 54.4 ° |
| 48.0 | 5.4 ° | 7.6 ° | 41.1 ° | ||||||
| 50.0 | 5.2 ° | 7.3 ° | 8.2 ° | 8.7 ° | 10.1 ° | 12.9 ° | 14.6 ° | 16.2 ° | 39.6 |
| 75.0 | 3.5 ° | 4.9 ° | 5.5 ° | 5.8 ° | 6.7 ° | 8.6 ° | 9.8 ° | 10.8 ° | 27.0 ° |
| 78.0 | 3.4 ° | 4.7 ° | 5.3 ° | 5.6 ° | 6.5 ° | 8.3 ° | 9.4 ° | 26.0 ° | |
Bei den Bildwinkeln in dieser Tabelle handelt es sich um rechnerische Werte. Die jeweiligen Bildwinkel des einzelnen Objektives können konstruktionsbedingt von den rechnerischen Werten abweichen.
1) nur zur Indikation